
INTRODUCTION

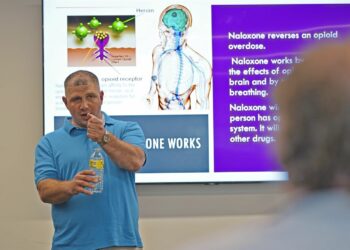
Fig. 1. Sustainable 3D-printed comfortable actuators with built-in waveguide sensors.
(A) Biodegradable constituents allow a cradle-to-cradle design for comfortable robotics, the place thermoreversibility opens an extra subcycle for a number of utilization and prolonged lifetime. (B) Three-chamber pneumatic actuator with fiber reinforcement and built-in optical sensors. The sensors detect obstacles within the path of the actuator and permit elimination of the article. (C) When immersed in water, the gelatin actuator and waveguides swell and dissolve. Full biodegradation is enabled in sewage or compost.
DISCUSSION
On this work, we current an omnidirectional comfortable actuator, 3D-printed from sustainable biomaterials, which options multifaceted sensing capabilities realized by 3D-printed comfortable optical waveguides. The versatile and high-precision sensor community is able to buying data on the actuators bending state and contact occasions with objects in its surrounding. This permits the implementation of a search-and-wipe routine, which permits the comfortable robotic to autonomously localize obstacles in its neighborhood and take away them with a push.
Growing the extent of complexity will even require extra superior actuator shapes and multimaterial mixtures. Up to now, the viscosity and cooling time hinder printing of overhanging options or cavities. Growing appropriate biodegradable assist supplies will resolve these points together with multimaterial printing. Furthermore, multimaterial printing will allow mixtures of mechanically, electrically, and optically tuned biogels to realize actuation mechanisms past pneumatic management and improve sensing and management capabilities for extremely built-in robots.
Accompanying technical enhancements, end-of-life concerns are essential for future sustainable growth. The primary construction of our robotic, together with the fiber reinforcement and waveguides, is fully biodegradable. As well as, the biogel’s water solubility permits a easy technique to separate the robotic from its nonbiodegradable management elements, permitting their reuse. Alongside this ecofriendly fabrication strategy utilizing biodegradable supplies, we launched an extra reuse cycle the place the biogel is reprinted as much as 5 occasions, sustaining greater than 70% of the preliminary efficiency metrics. Extra reprint cycles may very well be realized by restoring the printability by means of rehydration of the biogel and decreasing the printing temperature or shortening the heating interval by growing the printing pace. The offered accessible, sustainable, and cost-effective fabrication technique will possible have a constructive affect on comfortable and collaborative robotics by means of a diminished ecological footprint.
MATERIALS AND METHODS
Supplies
Printing of biogel inks
The biogel ink was printed with a reservoir temperature of 75°C and a nozzle temperature of 65°C. The printing pace will depend on the geometry of the print as a result of it’s outlined by a “minimal time per layer” worth, which was set 90 s and a most pace of 1000 mm min−1. The layer peak was set to 0.2 mm.
All samples for tensile testing had been printed below ambient situations with out further cooling. For all different prints, further cooling was used to make sure dimensionally secure printing of 3D objects.
For the printing angle take a look at, a number of samples sequence had been ready, the place the printing course of subsequent layers is shifted by an angle α (fig. S3A), and tensile checks had been performed for various α between 0° and 180° (fig. S3B).
For the decision take a look at, a single-lined meander construction with lowering line spacing was printed. Beginning with a spot of 10 mm, the road spacing was diminished by 1 mm every step. After reaching 1 mm, it was halved for 2 steps all the way down to 0.25 mm.
Mechanical characterization
Standardized dumbbell-shaped samples [ISO527-2:1996(5A)] had been ready for uniaxial tensile checks. All checks had been carried out at ambient situations on a uniaxial tensiometer (Zwick Roell Z005, 100 N load cell) at a pressure fee of fifty mm min−1. Younger’s modulus was obtained utilizing a modified hyperelasticity mannequin for neo-Hookean solids (see the Supplementary Supplies).
For the drying experiments, the samples had been saved below ambient situations. The said pattern age is the storage time after printing.
For the recycling and heating period experiments, the samples had been saved in a local weather chamber at 23°C and 50% relative humidity (rH). Testing was then accomplished 24 hours after every print, if not said in any other case.
For the recycling of shellac-coated biogels, the samples had been coated with the shellac-PEG answer after printing and saved for twenty-four hours below ambient situations. The mixed materials was then recycled, and once more, samples had been printed and saved for twenty-four hours below ambient situations earlier than testing.
Cyclic tensile checks had been carried out for eight cycles and 100% pressure. The samples had been printed and saved for twenty-four hours below ambient situations beforehand. Vitality dissipation was then calculated from the realm between extension and rest curve.
For adhesion checks, biogels (120 mm by 30 mm by 2 mm) had been printed instantly on completely different substrates on an space of 70 mm by 30 mm, and the surplus finish of fifty mm by 30 mm was printed on polyethylene terephtalat (PET) foil. A sheet of the identical PET foil was placed on prime of the samples, they usually had been saved for twenty-four hours below ambient situations. The foils had been utilized to forestall elongation of the biogel samples throughout peel checks. The surplus finish of the biogel was then fastened within the tensiometer at an angle of 90°, and the biogel was peeled off of the substrate at a fee of fifty mm min−1. The debond vitality was then calculated from the seperating power (see the Supplementary Supplies).
For a comparability of printing to mould casting, three completely different preparation strategies had been examined. Mould casting of a sheet and punching out take a look at samples known as technique A (fig. S4A), 3D printing of a sheet and punching out take a look at samples known as technique B (fig. S4B), and fully printed take a look at samples is technique C (fig. S4C). The solid samples had been sealed hermetic for 48 hours after casting and dried below ambient situations for an additional 24 hours, whereas the printed samples had been dried for 72 hours earlier than they had been examined.
Optical characterization
Molten biogel was solid right into a mould, to kind a sheet of the specified thickness, the place it cooled down for not less than 48 hours. Then, the samples had been reduce out of the sheet.
To find out the refractive index, 1-mm-thick samples had been measured with an analog Abbe refractometer (AR4, Kruess Optronics GmbH) at a wavelength of λ = 589 nm. The temperature of the illumination and measuring prism was stored between 18° and 22.5°C utilizing water cooling (TC9, Tamson).
A set of refractive index measurements was carried out with completely different constituents’ lots. Every set of experiments is listed in desk S3.
Two-millimeter-thick samples had been ready, and experiments had been performed 12 hours after casting to measure the change in refractive index over time. The samples had been suspended to dry environment (23°C, 40% rH) for 10 hours. As soon as per hour, the samples had been taken out of the chamber to measure the refractive index. The temperature of the refractometer’s illumination and measuring prism remained between 23.4° and 26.4°C.
The absorbance of biogel compounds was measured utilizing a spectrophotometer (LAMBDA 1050 UV-visible Spectrophotometer, PerkinElmer). The biogel was solid into a ten mm–by–10 mm flask manufactured from quartz glass (OS Excessive Precision Cell, Hellma Analytics) and measured alongside a reference pattern containing distilled water (18 kilohm) over a spectrum of 250 to 800 nm.
Waveguides and waveguide controller
The waveguides on this work had been slab waveguides with out cladding, with a cross part of two mm by 2 mm. They had been fully 3D-printed of the biogel ink.
We used LEDs and PDs with spectral vary within the IR (LED: Osram SFH4350, PD: Osram SFH229FA) to decrease background noise from ambient mild. They had been coupled to the waveguides by melting the waveguides’ ends domestically and urgent them onto the information of the LEDs and PDs. For depth readouts, we used an Arduino Nano (Arduino s.r.l.). The LEDs had been pushed by the Arduinos digital ports, and the PDs had been learn out on its analog ports through the use of easy amplification circuits (fig. S11).
The take a look at setup for bending measurements was based mostly on a commercially accessible 3D printer (fig. S10). A chunk of PET filament of two.85 mm in diameter was fastened on one finish and rotatably mounted on the printer’s x axis. On this means, the filament fashioned a round form, and its diameter may very well be adjusted by shifting the x-axis carriage of the printer. The waveguide was fastened to the filament to comply with the diameter modifications as depth readouts had been carried out.
Fabrication and management of pneumatic actuators
The primary physique was cylindrical with three chambers inside, organized in 120° rotation. It had a complete peak of 6.5 cm with a wall thickness of two mm and 5 mm prime and backside thickness. Improved bending motion was achieved through the use of fiber reinforcement to forestall radial enlargement. This reinforcement consisted of cotton threads obliquely wound across the biogel cylinder.
The fabrication began with a semi-closed three-chambered cylinder, which was 3D-printed on prime of six cotton threads that had been organized pairwise in 120° rotation on the constructing plate. Afterward, one thread of every pair was wound across the cylinder at an angle of 10° to the highest in a clockwise method and the opposite three threads in counterclockwise. The threads had been then fastened onto the cylinder’s floor by making use of a skinny layer of shellac-PEG answer, which fashioned a versatile coating after evaporation of the solvent. Silicone tubes (outer diameter, 1.65 mm; interior diameter, 0.76 mm; Freudenberg Medical) of 10 cm in size had been dip-coated on one finish (1 cm) with the actuator end-cap gel (desk S3) and inserted right into a preheated mould (60°C) of cylindrical form (18 mm in diameter and eight mm in peak). The identical biogel, heated as much as 95°C, was then poured into the mould, adopted by partial insertion of the semi-open cylinder into the biogel to shut the actuator. The actuator was launched from the mould after the biogel was cooled down and polymerized.
For monitoring and mapping the strain, a crimson ball (10 mm in diameter) was connected to the actuator’s prime. The actuator’s chambers had been then pressurized, and motion was recorded on video from a prime view of the setup. Pressures, starting from 0 to 46 kPa, had been utilized in 2-kPa steps to 2 chambers at a time in all doable mixtures. The trail of the colorized ball was tracked utilizing image-processing options of the OpenCV libraries, and the ultimate coordinates for every strain mixture had been decided. These coordinates had been then normalized to a radius of 1 and mapped to corresponding strain values. This resulted in a 2D strain map of individually addressable positions.
Actuation was managed by three pneumatic valves (ITV 0030-3BS, SMC) that managed the strain of the person chambers proportionally to their enter indicators. These enter indicators had been managed utilizing a microcomputer (Raspberry Pi, Raspberry Pi Basis). Actuation was achieved both instantly, by way of lists of strain values and corresponding coordinates, or dynamically. Dynamic controls had been applied through the use of a commercially accessible joystick controller (Dualshock 4 Wi-fi-Controller, Sony Company). Coordinates of the joystick’s place had been in contrast with the entries of the 2D strain map in actual time. Indicators proportional to the strain values of the entry with the smallest distance had been then despatched to the valves.
Actuator characterization
Experiments had been performed in managed environmental situations utilizing a local weather chamber (23°C, 40% rH) 24 hours after fabrication of the actuator, except in any other case said. A crimson stick (3 mm in diameter and 15 in mm size) was mounted on the actuator’s prime to permit dependable monitoring of its motion. A single chamber was pressurized, and the motion was recorded on video from a perspective perpendicular to the actuator’s aircraft of motion. Bending angles had been then calculated because the enclosing angle of the actuator’s prime aircraft’s regular in a relaxed and pressurized state. The aircraft’s regular corresponds to the crimson stick’s place, decided utilizing picture processing options of Mathematica. Measurements had been repeated 5 occasions, and values are offered utilizing the imply worth and the SD, respectively.
Bending efficiency was analyzed for every of the three chambers of 1 actuator. Strain values ranged from 0 to 60 kPa with steps of two.5 kPa. The utmost bending angle was decided by pressurizing one chamber till failure. Strain values began at 0 kPa with steps of two.5 kPa. Bending angles had been decided for the totally pressurized state instantly earlier than rest.
The actuator’s response with step-wise utilized strain was performed on a single chamber of 1 actuator. A strain of fifty kPa was utilized for two s, with the recording began earlier than and stopped after in the identical intervals. Bending angles had been decided for each body of the video (60 fps). The time through which the actuator reaches 90% of the ultimate bending angle was decided as an indicator of efficiency named response time. Step response experiments had been repeated each 30 min for 70.5 hours with a strain of 40 kPa, beginning proper after the fabrication course of was completed. The indicator of efficiency was once more the time when the actuator reached 90% of its remaining bending angle (fig. S12C).
For the dissolution experiment, a three-chamber actuator was put right into a glass beaker, crammed with 150 ml of DI water, and left in a local weather chamber at 23°C and 50% rH for 40 hours.
To investigate growing old, an actuator was ready and assembled with waveguide sensors. Actuation was carried out after 20 days supplying 90-kPa strain. The depth readings from the waveguide sensors had been recorded concurrently.
Statistics
Every knowledge level represents a imply worth of n samples as indicated within the corresponding determine captions. Error bars and error bands characterize the SD.
Acknowledgments
We thank D. Danninger for the assist in determine design.
Funding: This work was supported by the European Analysis Council Beginning Grant “GEL-SYS” below grant settlement no. 757931 and Austrian Analysis Promotion Company GmbH (FFG) throughout the COMET-project TextileUX below grant settlement no. 865791.
Writer contributions: M.Okay., M.B., and M.D. conceived the mission. A.H. and M.D. developed and characterised the 3D printer. M.B. supervised the biogel growth. A.H., D.P., L.L., and E.W. ready the biogels. A.H., M.B., E.W., and R.G. characterised the printed biogel samples. A.H., M.B., E.W., and F.H. analyzed the information. F.H. supervised the event of waveguide sensors. L.L. performed the optical characterization of the biogel, analyzed the information, and developed the theoretical mannequin. A.H. performed the characterization of the waveguide sensors and analyzed the information. D.P. and M.B. developed and characterised the pneumatic actuator, analyzed the information, and developed the management setup and software program. A.H. and D.P. developed the actuator with built-in waveguides and designed the experiments. A.H., D.P., and D.S. wrote the software program. M.Okay. gave enter in any respect phases. A.H., D.P., L.L., F.H., and M.Okay. designed the figures and wrote the manuscript. All authors contributed to enhancing the manuscript. M.Okay. supervised the analysis.
Competing pursuits: The authors declare that they haven’t any competing pursuits.
Knowledge and supplies availability: All knowledge wanted to guage the conclusions within the paper can be found in the primary textual content or the Supplementary Supplies.














{kind=link}